null
-Lorsque l’objet est lancé verticalement vers le haut, la valeur de la vitesse diminue entre deux instants voisins.
Le système ralentit : le poids et le vecteur vitesse ont la même direction mais n’ont pas le même sens.
-Lorsque l’objet est lâché, la vitesse augmente entre deux instants voisins.
Le système accélère : le poids et le vecteur vitesse ont le même sens et la même direction.
Définition
-énoncé
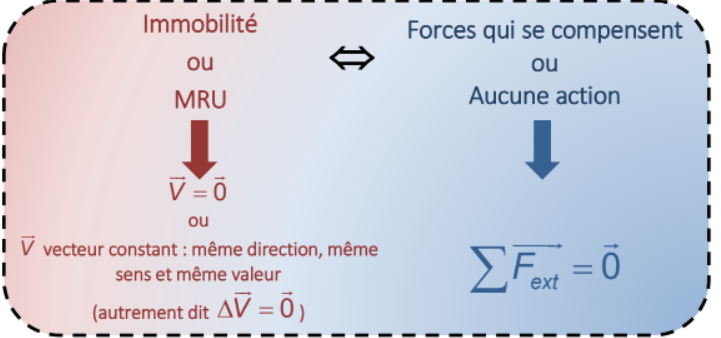
Dans un référentiel (dit Galiléen), si un système (modélisé par un point matériel) est soumis à des forces extérieures qui se compensent (? vecteur Fext = vecteur nul) ou s’il ne subit aucune force (vecteur Fext = vecteur nul), alors il persévère dans son état de repos (s’il est immobile) ou de mouvement rectiligne uniforme (MRU) (s’il est en mouvement).
-réciproque
Dans un référentiel (dit Galiléen), si un système (modélisé par à un point matériel) persevere dans son état de repos(s'il est immobile) ou de MRU (s'il est en mouvement) alors soit il n’est soumis à aucune force (vecteur Fext = vecteur nul) soit il est soumis à des forces extérieures qui se compensent (? vecteur Fext = vecteur nul).
-contraposée
Dans un référentiel (dit Galiléen), si un système (modélisé par à un point matériel) est soumis à des forces qui NE se compense PAS (? vecteur Fext ? vecteur nul), alors il n’est NI au repos (ni immobile), NI en mouvement rectiligne uniforme (autrement dit son vecteur vitesse varie).
-chute libre
Lorsqu’un système est soumis uniquement à son poids, on dit que le système est en chute libre.
Définitions
-énoncé
Dans un référentiel (dit Galiléen), si un système (modélisé par un point matériel) est soumis à des forces extérieures qui se compensent (? vecteur Fext = vecteur nul) ou s’il ne subit aucune force (vecteur Fext = vecteur nul), alors il persévère dans son état de repos (s’il est immobile) ou de mouvement rectiligne uniforme (MRU) (s’il est en mouvement).
-réciproque
Dans un référentiel (dit Galiléen), si un système (modélisé par à un point matériel) persevere dans son état de repos(s'il est immobile) ou de MRU (s'il est en mouvement) alors soit il n’est soumis à aucune force (vecteur Fext = vecteur nul) soit il est soumis à des forces extérieures qui se compensent (? vecteur Fext = vecteur nul).
-contraposée
Dans un référentiel (dit Galiléen), si un système (modélisé par à un point matériel) est soumis à des forces qui NE se compense PAS (? vecteur Fext ? vecteur nul), alors il n’est NI au repos (ni immobile), NI en mouvement rectiligne uniforme (autrement dit son vecteur vitesse varie).
-chute libre
Lorsqu’un système est soumis uniquement à son poids, on dit que le système est en chute libre.